
CSCI 461: Computer Graphics
Middlebury College, Fall 2023
Lecture 10: Animation 1 (Curves)
Two Modifications to the course structure.
(1) no ShaderToy report, (2) can leave 1 lab in M status for an A.

We know how to take pictures right now.

How should we create movies?

One option: use physics?
Another option? Let the artist decide.

Main goal: compute "inbetween" frames by interpolating scene parameters at known frames.
{kind=link}
By the end of today's lecture, you will be able to:
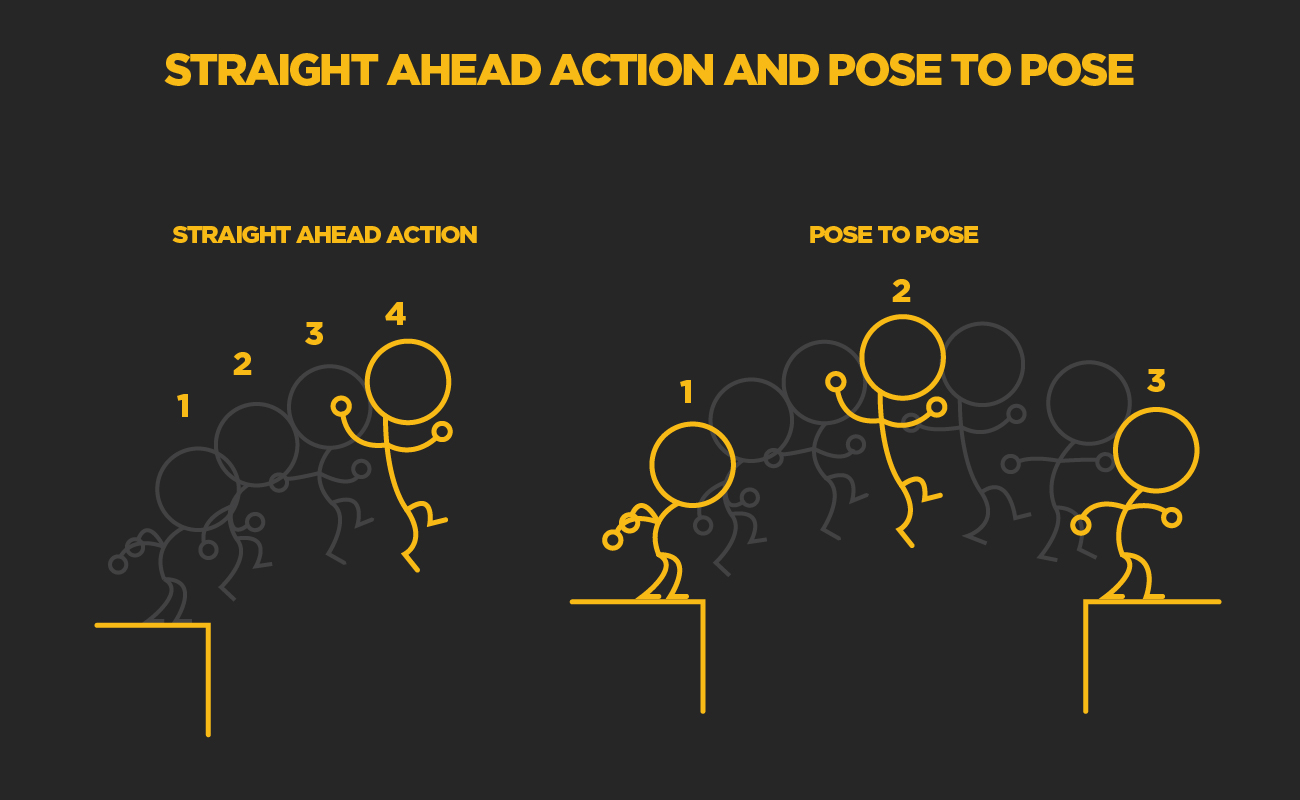
- specify scene parameters as keyframes in an animation,
- interpolate points to define a smooth curve,
- construct cubic splines from control points,
- represent cubic splines using a Hermite basis and a Bézier basis,
- apply de Casteljau's algorithm to evaluate and render a cubic Bézier curve.

Exercise 1: a few attempts.

Things to be careful of ...

Attempt #3: splines - glue together several curves.
Hermite basis: specify value and derivative at end points.
Solving for coefficients.
$$ y(t) = \left[\begin{array}{cccc} t^3 & t^2 & t & 1 \end{array}\right] \left[\begin{array}{cccc} \phantom{-}2 & -2 & \phantom{-}1 & \phantom{-}1 \\ -3 & \phantom{-}3 & -2 & -1 \\ \phantom{-}0 & \phantom{-}0 & \phantom{-}1 & \phantom{-}0 \\ \phantom{-}1 & \phantom{-}0 & \phantom{-}0 & \phantom{-}0 \end{array}\right] \left[\begin{array}{c} y_{i} \\ y_{i+1} \\ y^\prime_{i} \\ y^\prime_{i+1} \end{array}\right]. $$ And in 2d: $$ \vec p(t) = \left[\begin{array}{cccc} t^3 & t^2 & t & 1 \end{array}\right] \left[\begin{array}{cccc} \phantom{-}2 & -2 & \phantom{-}1 & \phantom{-}1 \\ -3 & \phantom{-}3 & -2 & -1 \\ \phantom{-}0 & \phantom{-}0 & \phantom{-}1 & \phantom{-}0 \\ \phantom{-}1 & \phantom{-}0 & \phantom{-}0 & \phantom{-}0 \end{array}\right] \left[\begin{array}{c} \vec p_{i} \\ \vec p_{i+1} \\ \vec v_{i} \\ \vec v_{i+1} \end{array}\right] $$
Bézier basis: specify 4 controls points of each spline.
Math break!
Combining terms to isolate Bézier basis functions.
$$ \left[\begin{array}{cccc} t^3 & t^2 & t & 1 \end{array}\right] \left[\begin{array}{cccc} -1 & \phantom{-}3 & -3 & \phantom{-}1 \\ \phantom{-}3 & -6 & \phantom{-}3 & \phantom{-}0 \\ -3 & \phantom{-}3 & \phantom{-}0 & \phantom{-}0 \\ \phantom{-}1 & \phantom{-}0 & \phantom{-}0 & \phantom{-}0 \end{array}\right] \left[\begin{array}{c} \vec q_0 \\ \vec q_1 \\ \vec q_2 \\ \vec q_3 \end{array}\right] $$
Properties of Bézier basis functions.

Evaluating a Bézier spline: use basis functions or de Casteljau's algorithm.
Rendering a Bézier spline using de Casteljau's algorithm.
Exercise 2: evaluate and render a curve (by hand!).
- Evaluate the Bézier curve at $t = 0.25$ and $t = 0.75$. Do this in two ways: (i) using de Casteljau's algorithm and (ii) by plugging $t$ into the basis functions.
- Render the curve using de Casteljau's algorithm with a maximum recursion depth of 2.